

自动驾驶汽车在交通安全、交通效率、环境保护和节能方面发挥着积极的作用。随着智能车辆的发展,如何与这些动态的、随机的、多样化的交通参与者进行交互,是实现混合交通高水平自动驾驶的潜在挑战。因此,自主驾驶类人决策系统的研究是必要的。但仍存在一些挑战:1)如何识别周围交通参与者的意图,而不是根据周围车辆的当前状态被动地加速或制动; 2)如何量化复杂环境下不同交通因素引起的驾驶风险; 3)如何规划具体的驾驶策略,提高复杂环境下的决策能力。
1. 自动驾驶汽车的决策和运动规划
- 研究成果
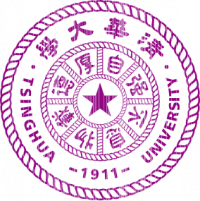
针对现有的智能决策系统的问题是难以适应的司机在复杂的交通环境和集成各种驾驶辅助功能,我们提出一个拟人化的决策战略决策机制自学的基础上,提出“学习人,模拟人和超越人”的想法。通过分析各种影响因素的风险评估之间的关系,基于交通元素之间的函数关系和车辆机动系统特征,我们将解决动作的机械系统找到最优解,并使智能车辆适应人类的个性但不限于在特定场景。将驾驶员决策背后的物理机制与人工智能方法相结合,建立统一的智能驾驶决策模型,实现基于驾驶员特征识别的个性化驾驶决策和多目标协同控制。
- 代表作
研究骨干:黄荷叶
- Heye Huang, Yang Li, Xunjia Zheng, Jianqiang Wang*, Qing Xu, Sifa Zheng. Objective and Subjective Analysis to Quantify Influence Factors of Driving Risk. In IEEE Intelligent Transportation Systems Conference (ITSC), 2019.
- Heye Huang, Wenjun Liu, Xunjia Zheng, Qing Xu, Jianqiang Wang*. Path Planning for Vehicle Obstacle Avoidance Based on Collaborative Perception. In International Conference on Green Intelligent Transportation Systems and Safety (GITSS), 2019.
- Xunjia Zheng, Heye Huang, Jianqiang Wang*, Xiaocong Zhao, Qing Xu*. Behavioral decision-making model of the intelligent vehicle based on driving risk assessment. Computer-aided Civil and Infrastructure Engineering, 2019.
- 王建强, 郑讯佳, 黄荷叶. 驾驶人驾驶决策机制遵循最小作用量原理[J]. 中国公路学报, 2019.
2. 基于动态交通环境预测与交互的智能驾驶决策方法
- 研究背景
自动驾驶决策技术在很多简单场景中已得到成功应用,但面对更加复杂的城市交通环境,现有方法仍无法有效应对动态多变的人-车、车-车混行场景、实现安全与高效的驾驶决策。研究适应动态环境的决策方法、融合人/车行为认知与意图交互技术,使智能车能够学习人类所具有的预测与博弈能力,将对提高智能化驾驶决策水平、推进无人驾驶城市应用带来重要意义。

- 研究成果
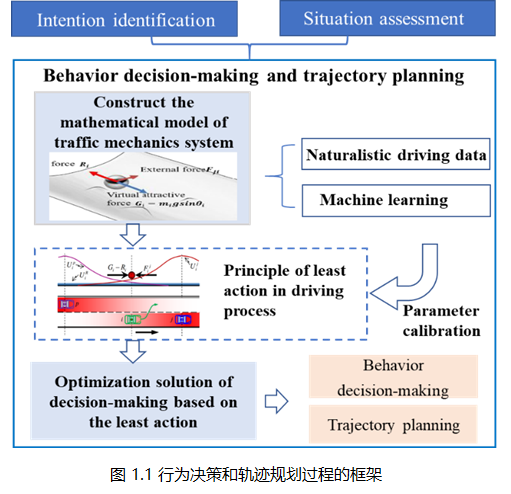
基于风险评估的安全场方法与滚动时域优化方法,首先提出了一种考虑目标意图预测的运动规划算法。相对于其它方法,能够更有效地在动态环境中考虑意图识别的不确定性与其他风险因素,实现拟人化的安全决策。当前的研究进一步考虑冲突场景中的多智能体交互过程,基于博弈论的方法建立决策模型,并基于数据与逆强化学习方法对驾驶人行为与特性进行提取。
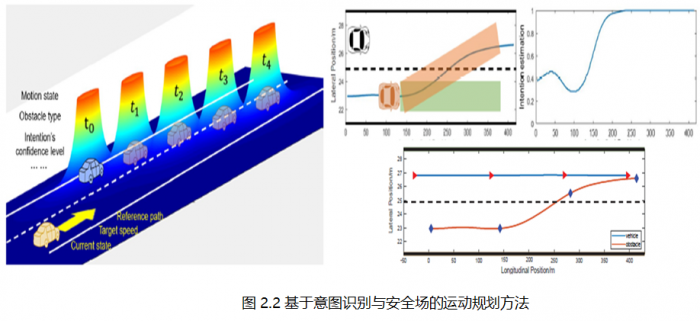
随着智能驾驶算法的复杂化,车载处理器对算力、能耗与体积具有极高的要求。课题基于FPGA的并行运算能力开展智能驾驶算法设计与车载应用,实现了包含A*搜索、贝赛尔曲线等路径规划算法的FPGA设计,并基于Altera Stratix V设计PCI-e通信模块,在课题组实验平台车上进行了搭载与性能测试。
- 代表作
研究骨干:崔明阳
