

自动驾驶汽车在交通安全、交通效率、环境保护和节能方面发挥着积极的作用。随着智能车辆的发展,如何与这些动态的、随机的、多样化的交通参与者进行交互,是实现混合交通高水平自动驾驶的潜在挑战。因此,自主驾驶类人决策系统的研究是必要的。但仍存在一些挑战:1)如何识别周围交通参与者的意图,而不是根据周围车辆的当前状态被动地加速或制动; 2)如何量化复杂环境下不同交通因素引起的驾驶风险; 3)如何规划具体的驾驶策略,提高复杂环境下的决策能力。
1. 基于行人行为识别与意图识别的轨迹预测方法
- 研究背景
行人轨迹预测在车辆防撞保护系统及自动驾驶中都起着重要作用。目前对行人轨迹预测的研究主要分为三类,它们分别基于运动模型,基于行人意图,以及基于学习性方法对行人轨迹进行预测。但这些方法对行人行为考虑较少,运动模型也往往不符合行人的运动特性。结合行人复杂行为,提出新的行人运动模型,进行行人意图识别,并最终融合行为与意图,获得良好的预测结果对提升自动驾驶安全性有着重要意义。
- 研究成果
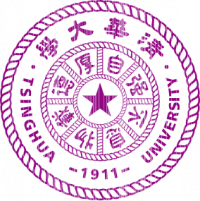
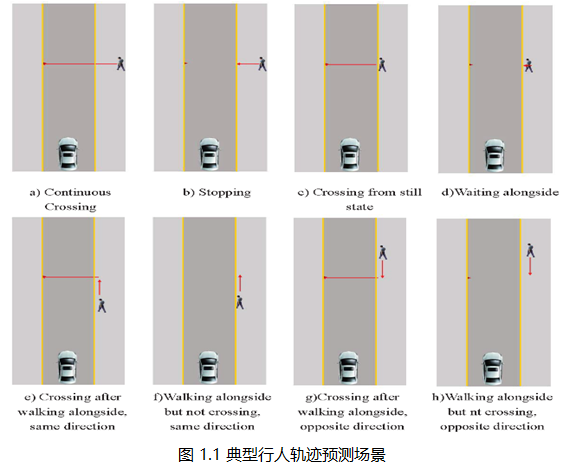
为了获得精确的行人轨迹预测结果,研究提出了一种基于行人行为和意图识别的行人轨迹预测方法。行为识别方法将行人行为分为站立、行走和跑步。结果表明,该分类对一般的人行横道场景具有较好的适应性。DBN用于获得行人过路意向,所有参数均来自一般过路场景的经验数据和公告数据。轨迹预测方法将行为和意图结果结合在一起,在采集的BPI数据集中定义的8个典型的人行横道场景中表现良好,尤其是在停止场景中。结果表明,该方法在不训练行人轨迹的情况下,可以准确地预测一般的人行横道场景的行人轨迹。
- 代表作
研究骨干:吴浩然
2. 基于博弈论的车辆意图识别
- 研究背景
理解并准确预测驾驶人、行人等的意图,判断其行为,是提高自动驾驶车辆安全性和智能性的重点和难点。尤其在中国复杂、时变、耦合的驾驶场景中,自动驾驶车辆与人的交互性更为重要。目前SOTA方法大多使用深度学习等黑箱模型,可解释性差。研究希望能够通过博弈论的可解释性模型,对驾驶场景中人的意图、行为进行建模。
- 研究成果
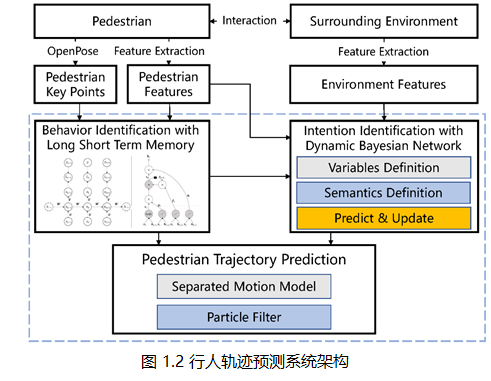
为了研究驾驶员驾驶过程中的驾驶意图交互过程,建立可解释性模型,采用混合动态博弈模型对其建模。利用现有自然驾驶数据集highD,对特定四车博弈场景进行筛选分析,用驾驶经验和实际数据拟合出驾驶收益函数,得出实际驾驶人的意图交互模型,最后输入到行车风险场中,得到全局风险评估结果。

- 代表作
研究骨干:杨奕彬
