

1. 基于多传感器融合的智能汽车环境感知技术研究
- 研究背景
自动驾驶领域,环境感知是基础。由于各传感器各具优缺点,多传感器融合已成为目前环境感知的研究热点和研究难点。多传感器融合感知方法研究将为构建智能交通和发展自动驾驶提供技术支撑,对汽车行业智能化发展具有重要的研究意义和积极的推动作用。

- 研究成果
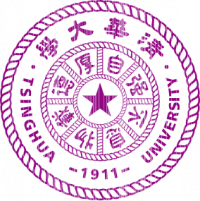
为解决远距离稀疏点云中目标轮廓缺失造成的运动车辆检测难题,研究提出了基于PE-CPD的运动车辆检测算法。该方法利用随目标距离和虚拟扫描映射角度分辨率自适应变化的阈值筛选场景中的运动目标,随后利用点云配准信息结合运动状态校准和模型选择过程对目标进行位姿估计,并将其引入运动车辆检测过程中。实验结果表明,该方法获得了良好的运动车辆检测性能,尤其针对较远距离稀疏点云场景下的运动车辆检测性能提升明显。
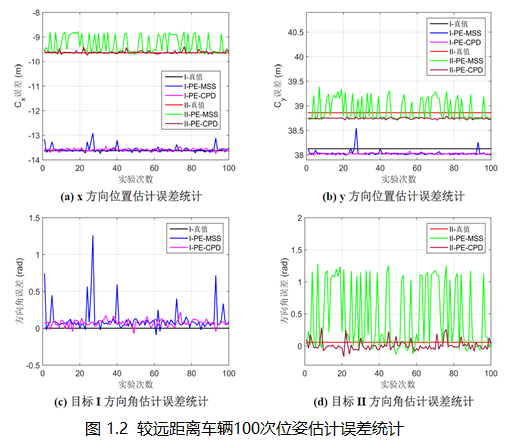
为解决地面起伏、障碍物遮挡以及点云稀疏等情况下的地面准确分割难题,研究提出一种基于混合回归技术的点云地面建模算法。该方法沿扫描径向利用RLWR结合梯度滤波器建立地面种子模型,获取全地面种子架构,基于此,沿扫描圆周向利用GPR进行地面自主建模,利用地面圆周向连续性弥补径向点云缺失带来的建模误差。该方法使用地面全平面连续性预测地面点云高度,提高了算法对环境的鲁棒性。
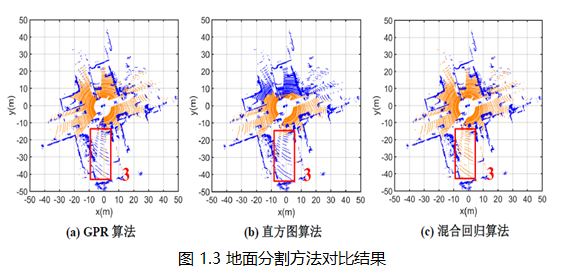
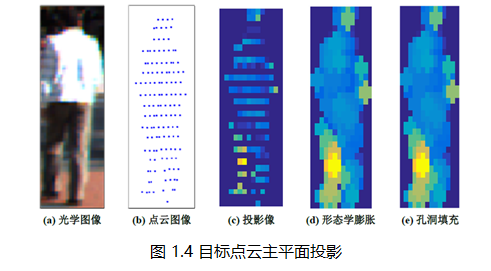
同时,研究提出了基于单模板匹配的点云行人检测算法。利用分层分割多层融合的KDE行人聚类算法解决邻近结伴行人欠分割难题。随后利用主平面投影构造潜在行人聚类的投影图,从中提取能够反映目标轮廓的LARK特征矩阵,计算与模板相似度,判断目标类型。该算法避免了对大量训练数据的需求,能有效区分场景中的行人与其他外形相似的目标。
- 代表作
研究骨干:刘凯琪
- Liu K, Wang W, Tharmarasa R, et al. Dynamic vehicle detection with sparse point clouds based on PE-CPD[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 20(5): 1964-1977.
- Liu K, Wang W, Wang J. Pedestrian Detection with Lidar Point Clouds Based on Single Template Matching[J]. Electronics, 2019, 8(7): 780.
- Liu K, Wang W, Tharmarasa R, et al. Ground surface filtering of 3D point clouds based on hybrid regression technique[J]. IEEE Access, 2019, 7: 23270-23284.
- Liu K, Wang J. Fast dynamic vehicle detection in road scenarios based on pose estimation with Convex-Hull model[J]. Sensors, 2019, 19(14): 3136.
- Liu K, Wang W. Pedestrian detection on the slope using multi-layer laser scanner[C]//2017 20th International Conference on Information Fusion (Fusion). IEEE, 2017: 1-7.
- Liu K, Wang W, Sun Z. Recognition of SAR image based on combined templates[C]//2013 IEEE International Conference on Imaging Systems and Techniques (IST). IEEE, 2013: 284-287.
2. 基于多目标优化的传感器优选与部署规划
- 研究背景
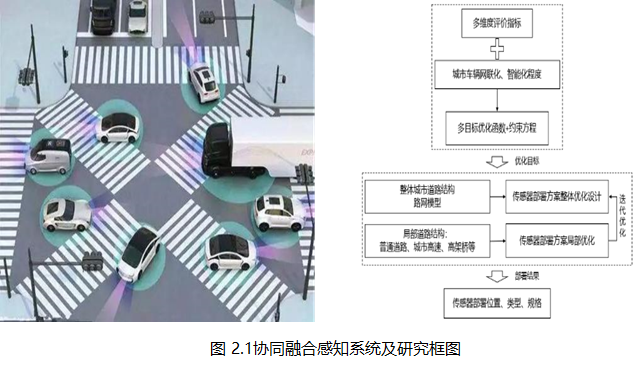
由于具有计算效率高、感知范围广等优点,车-路-云协同融合感知是智能网联汽车发展的必然趋势。传统的传感器部署优化问题研究往往只针对单一指标、单一变量进行优化且缺少合理的路网模型。因此,对多传感器感知系统和城市道路进行抽象化建模,并基于此研究面向感知系统的传感器部署多目标优化算法,对于智能网联汽车感知系统完善与资源充分利用具有积极、重要的意义。
- 代表作
研究骨干:卢政也
3. 基于多传感器信息融合的目标定位追踪
- 研究背景
智能网联车辆依赖于传感器的数据支持,在实际应用中单一传感器的工作原理以及应用特性都不同,在部分场景下无法满足需求,多传感器融合已经成为一种共识。应用传感器在信息复杂的环境中抵抗各种噪声干扰并准确识别目标物、融合异步异源信息、获取不变特征,是多传感器融合研究的重点内容,具有重要意义。
- 研究成果
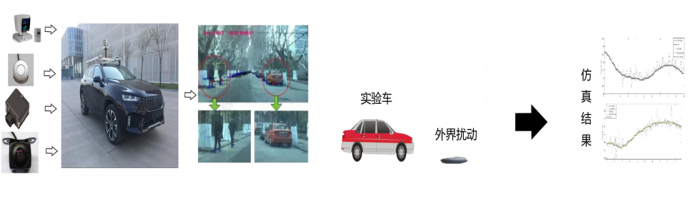
为了研究多传感器融合感知中如何去降低噪声干扰、提高多传感器融合后对目标的定位追踪的精准性,我们需要分析噪声的来源、针对传感器原始数据的噪声以及由于车辆的基准不稳定造成的噪声改进融合算法,将改进后的算法与未改进的算法进行比较从而减小定位追踪的误差。
- 代表作
研究骨干:朱世豪
