

1. 通信时延与丢包下智能网联汽车控制性能分析
- 研究背景
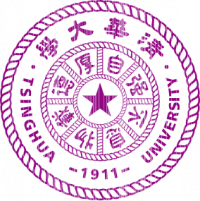
网联化技术使得智能汽车的感知、决策、控制等多个环节突破自车性能的限制,带来安全、高效、舒适与节能等多方面的提升。然而,网联化技术固有的通信时延与丢包将影响智能网联汽车网联控制的安全与性能。研究智能网联汽车的横向与纵向网联控制应用受时延与丢包的影响,对智能网联汽车的应用有重要意义。
- 研究成果
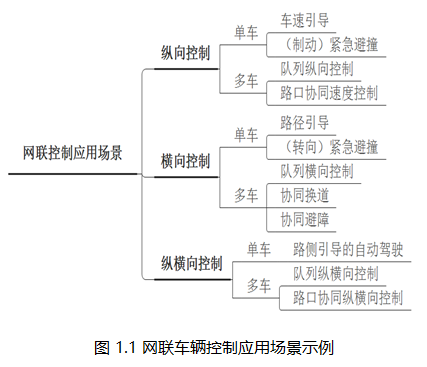
通过Simulink与CarSim联合仿真研究了时延与丢包对网联路径跟踪控制与网联跟车控制的影响,得出了如下结果。横向控制误差与时延及丢包率呈非线性正相关。时延、丢包率及弯道半径存在阈值,在阈值内误差变化平缓,在阈值外误差增长快速。纵向控制中,稳态距离误差与时延呈正比例,瞬态误差与时延正相关,在超过一定丢包率时,稳态误差增长快速。
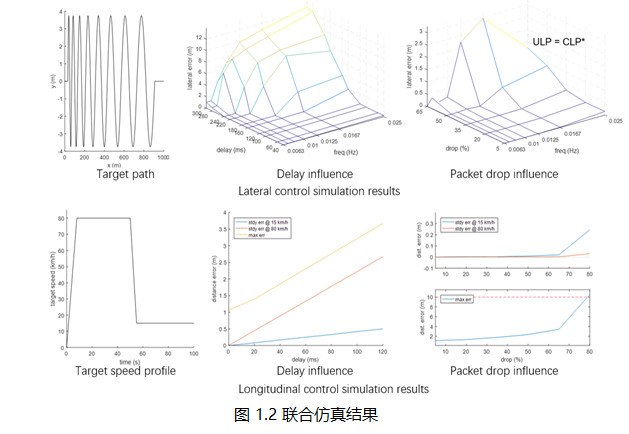
通过自动驾驶试验平台及LTE-V原理样机进行了实车试验,取得了如下结果。随机因素对控制误差的影响与一定小时延与丢包率影响相当。大时延与丢包造成横向控制响应迟缓、误差加大、轨迹低频震荡。时延及丢包率与纵向控制误差非严格正相关。一定大时延与丢包率下,时延与丢包出现时机比其严重度对控制影响更显著。
- 代表作
研究骨干:常雪阳
2. 有界对抗信息下智能网联车辆控制方法
- 研究背景
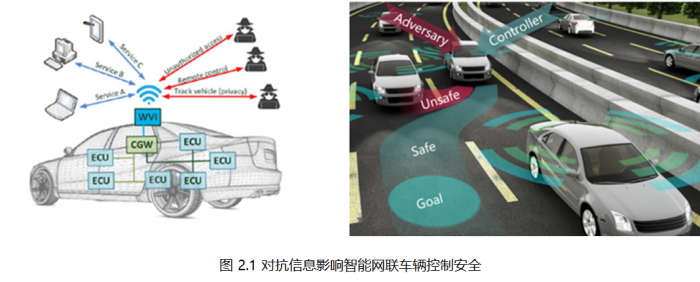
未来,车联网环境可能使智能网联车辆的控制系统遭受对抗信息的入侵,从而影响车辆控制的安全性,而车辆的安全性至关重要。因此,研究适应于对抗信息的车辆控制方法以确保车辆的安全性具有实际意义。一方面,经典控制方法在此情况下不足以保证车辆的控制安全;另一方面,现有关于对抗信息下控制方法的研究依然存在一些问题,如复杂时变约束下难求解、控制性能优化不足、与车辆控制结合不紧密等,仍需更多的研究加以完善。
- 研究成果
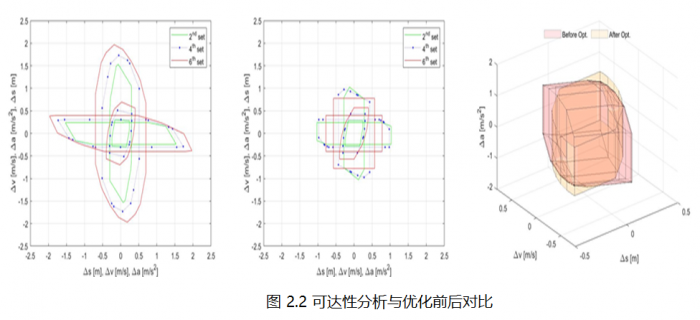
为研究不确定的有界对抗信息对车辆状态的潜在影响,对车辆在这一情况下的状态可达性进行了分析。通过采用状态反馈控制律,可将车辆未来的实际轨迹与参考轨迹之间的偏离量与参考轨迹的选取解耦,并能实现二者偏离量所成的差分可达集的可达性分析。进一步,通过构建动态反馈控制律的优化问题,既能缩小且重塑差分可达集,又能为用于参考轨迹生成的控制量界限留出更多余地,在一定程度上缓解了现存反馈矩阵与控制量界限的权衡折中关系。
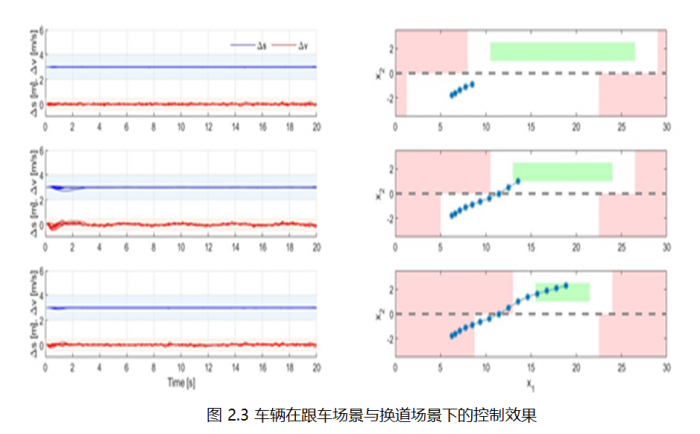
为保证车辆在有界对抗信息下车辆控制的安全性,基于可达性分析并借助可满足性模理论进行了车辆安全性验证,在滚动时域控制的框架下建立了适用于车辆在无限时域下的优化控制方法。一方面得到既保证安全性、又兼顾控制性能的参考轨迹最优控制策略,另一方面可提升所研究车辆控制方法在更多复杂交通场景下的适用性。跟车场景与换道场景下的仿真结果验证了控制方法的有效性。
- 代表作
研究骨干:刘艺璁
