

自动驾驶汽车在交通安全、交通效率、环境保护和节能方面发挥着积极的作用。随着智能车辆的发展,如何与这些动态的、随机的、多样化的交通参与者进行交互,是实现混合交通高水平自动驾驶的潜在挑战。因此,自主驾驶类人决策系统的研究是必要的。但仍存在一些挑战:1)如何识别周围交通参与者的意图,而不是根据周围车辆的当前状态被动地加速或制动; 2)如何量化复杂环境下不同交通因素引起的驾驶风险; 3)如何规划具 体的驾驶策略,提高复杂环境下的决策能力。
1. 考虑人车路特性的行车风险综合评估
- 研究成果
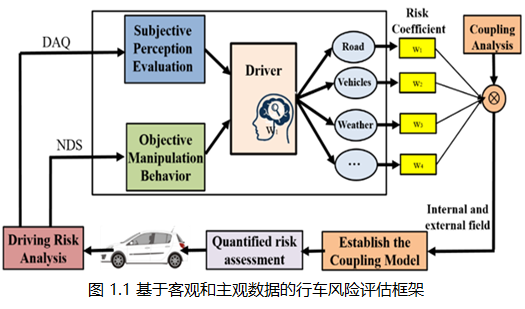
交通事故统计表明,在动态的交通环境中进行风险评估是必要的。如果风险与不同的交通元素(即。可准确评估道路、环境和车辆),可显著避免或减轻潜在的事故。因此,针对复杂道路交通环境状况难以评估的问题,研究提出了一种基于等效力和场理论的人车路耦合作用下的主客观风险统一驾驶环境状况评估方法。
- 代表作
研究骨干:黄荷叶
- Heye Huang, Yang Li, Xunjia Zheng, Jianqiang Wang*, Qing Xu, Sifa Zheng. Objective and Subjective Analysis to Quantify Influence Factors of Driving Risk. In IEEE Intelligent Transportation Systems Conference (ITSC), 2019.
- Heye Huang, Wenjun Liu, Xunjia Zheng, Qing Xu, Jianqiang Wang*. Path Planning for Vehicle Obstacle Avoidance Based on Collaborative Perception. In International Conference on Green Intelligent Transportation Systems and Safety (GITSS), 2019.
- Xunjia Zheng, Heye Huang, Jianqiang Wang*, Xiaocong Zhao, Qing Xu*. Behavioral decision-making model of the intelligent vehicle based on driving risk assessment. Computer-aided Civil and Infrastructure Engineering, 2019.
- 王建强, 郑讯佳, 黄荷叶. 驾驶人驾驶决策机制遵循最小作用量原理[J]. 中国公路学报, 2019.
2. 基于意图识别的态势分析
- 研究成果
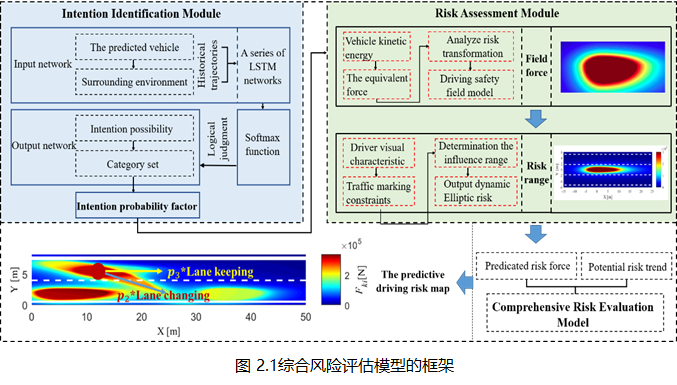
了解周边车辆的动态特性,估计混合交通的潜在风险,有助于安全高效的自主驾驶。现有的风险评估方法在提前发现危险情况和处理混合交通的不确定性方面存在挑战。研究在考虑周车意图的基础上对动态行车风险进行评估,并输出概率风险图支持车辆拟人化决策。具体来说,意图识别模块来识别周围车辆的意图可能性,人车路耦合模型可以通过分析驾驶员、车辆、道路三者之间的相互作用来反映三者之间的耦合关系。最后,形成了考虑多车交互的潜在风险图,输出给自主决策模块进行安全约束下实时行为决策。
- 代表作
研究骨干:黄荷叶
- Heye Huang, Yang Li, Xunjia Zheng, Jianqiang Wang*, Qing Xu, Sifa Zheng. Objective and Subjective Analysis to Quantify Influence Factors of Driving Risk. In IEEE Intelligent Transportation Systems Conference (ITSC), 2019.
- Heye Huang, Wenjun Liu, Xunjia Zheng, Qing Xu, Jianqiang Wang*. Path Planning for Vehicle Obstacle Avoidance Based on Collaborative Perception. In International Conference on Green Intelligent Transportation Systems and Safety (GITSS), 2019.
- Xunjia Zheng, Heye Huang, Jianqiang Wang*, Xiaocong Zhao, Qing Xu*. Behavioral decision-making model of the intelligent vehicle based on driving risk assessment. Computer-aided Civil and Infrastructure Engineering, 2019.
- 王建强, 郑讯佳, 黄荷叶. 驾驶人驾驶决策机制遵循最小作用量原理[J]. 中国公路学报, 2019.
3. 基于意图识别和轨迹预测的风险评估
- 研究背景
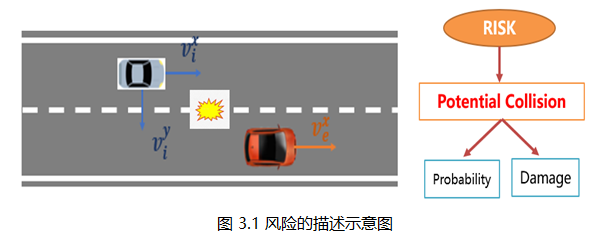
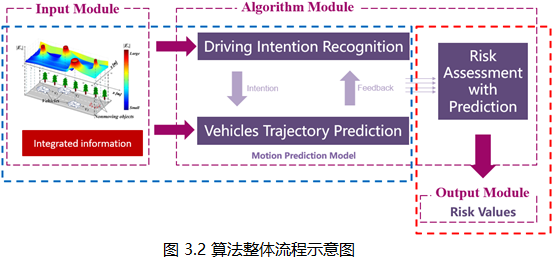
传统的风险评估方法仅仅考虑了当前的行车状况和环境因素,缺乏对周围运动物体的行为是否会改变的考虑。如果我们能够准确识别周围运动物体的意图,并预测其可能的轨迹,那么基于预测信息构建的风险评估模型能够更加准确的表现风险的分布,从而为风险评估之后的决策提供一个更好的支持。
- 研究成果
在预测信息的获取部分,我们采用了深度学习的方法。相比传统的将车辆的位置信息和速度信息直接作为训练数据的做法,我们首先将这些信息用场来描述,得到一个能够反应场景信息的矩阵作为输入。这样的方法提高了预测的准确率和对场景的适应性。最后,我们基于预测信息对环境进行风险评估模型的建立。
- 代表作
研究骨干:涂茂然
